





L'ESIPE, l'AFB et le pôle INSIDE investissent dans le champs de l'électronique embarquée OpenSource pour proposer des solutions évolutives à la surveillance de demain : le drone sous-marin Aquadrone permet d'aller récolter des données de surveillance sur les plans d'eau et les rivières à faible courant. Les données sont géolocalisées sur l'eau comme sous l'eau, et transférées en temps réel pour permettre une réaction immédiate des experts, sur la berge.
Un projet opérationnel issu d’une collaboration AFB/INSIDE – ESIPE (UPEM)
Le projet Aquadrone a été proposé par l'Agence Française pour la Biodiversité en septembre 2016 aux équipes de l’ESIPE (UPEM), pour la réalisation du projet de groupe Last project en école d’ingénieurs. Ce projet, qui a été retenu par les élèves ainsi que par l’équipe pédagogique, porte sur l’utilisation de drones sous-marins en lacs et en rivières de faible courant, pour réaliser une topographie des fonds.
Parmi les exigences notables du projet, on note la nécessité de disposer de l’affichage des données observées en temps réel sur logiciel SIG, ce qui implique de connaître à chaque instant la position du drone dans l’espace. Un effort important de conception et de développement a été produit pour mettre en œuvre une solution évolutive et utilisable sur le terrain par les équipes de l’AFB.
 |
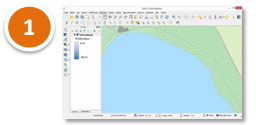
L'équipe Aquadrone a réalisé l'ensemble de la chaîne de production du drone : choix de la solution technique, montage des éléments électronique, conception des architectures logicielles et développement des plugins, test sur le terrain... Le drone initalement utilisé est le BlueROV2 de BlueRobotics, qui permet une grande modularité. |
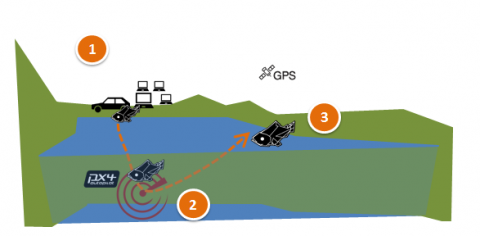
Défi d’innovation n°1 : Positionnement d’un drone sous l’eau (hors portée GPS)
 |
Etape 1. Installation du matériel sur la berge et calibrage des GPS.On considère que le positionnement est connu avec une précision de l’ordre de 50 cm. On initialise les systèmes informatiques et positionne les opérateurs. |
 |
Etape 2. Phase de plongée.Le drone est sous l’eau : il ne peut pas communiquer avec le GPS. La position est estimée à l’aide de la centrale inertielle. Il faut s’attendre à une dérive de cette position : précise au début, elle se décale progressivement avant de ne plus correspondre à la position réelle du drone. Il est alors nécessaire de remonter en surface. |
 |
Etape 3. Sortie hors de l'eau et recalibrageLe drone revient à la surface. Grâce au GPS RTK, il réévalue sa position précise (réelle) et corrige les données précédentes. Le drone, ayant réinitialisé son positionnement, peut effectuer une seconde plongée. |
Défi d’innovation n°2 : Accès aux informations en temps réel
 |
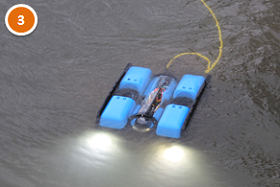
Etape 1 : Initialisation des connexions, préparation des cartes.Les opérateurs ouvrent le système d’information géographique (SIG) incluant les fonds cartes permettant l’expertise. A ce stade, il n’y a pas de données.
|
 |
Etape 2 : Le drone collecte des données lors de la plongée.Le drone est piloté grâce à une caméra embarquée, il est relié par un câble spécial au PC opérateur. |
 |
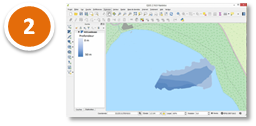
Etape 3 : Mise au point et correction des données.Lorsqu’il sort de l’eau et utilise le GPS, le drone redéfinit sa position avec précision. Un algorithme corrige les données précédemment transmises : l’affichage sur les postes clients est instantanément modifié. Si des anomalies sont remarquées, les experts peuvent immédiatement demander au drone de « retourner voir ». |
Perspectives scientifiques : nouveaux capteurs et modélisation, dans une approche OpenSource
Le mode d’exploration par plongée, avec un contrôle direct par un opérateur depuis la berge et la vidéo embarquée, permet une liberté de déplacement rare dans l’observation des milieux aquatiques.
Dans un avenir proche, installer des sondes capables de scruter précisément l’environnement (sondes physico-chimiques, sonars…) et de ramener de très grandes quantités d’information (nuages de points) ouvre des possibilités de modélisation des habitats très attendues par les scientifiques et les experts des eaux continentales superficielles.
 |
Le contexte OpenSource permet une appropriation et une adaptation complète des logiciels aux besoins métiers, mais exige un effort de conception et de développement par les équipes innovation / développement. Ce projet innove en utilisant des technologies OpenSource hardware : la philosophie « code libre » est appliquée aussi sur le matériel, qui s’ouvre aux innovations d’autres équipes universitaires et professionnelles. Les coûts sont minimisés (à titre indicatif le coût attendu d'un aquadrone équipé est estimé à moins de 5000 € TTC). |
") |
L'architecture logicielle a été mise au point par les étudiants de l'ESIPE, avec la validation de l'AFB. Les étudiants ont aussi prévu une simulation de flux MAVLink permettant de rejouer des sorties afin d'affiner ultérieurement les calibrages logiciels en mode développement. |
Perspectives opérationnelles : appuyer la collecte de données
 |
L’AFB a une mission d’information du public sur l’état écologique des eaux. Sur les territoires, les agents des délégations régionales, des services départementaux et des pôles de recherche réalisent des centaines de sorties terrain par an pour caractériser les milieux naturels. Le projet Aquadrone s’inscrit en complément à leur expertise et devra, à terme, s’intégrer dans leurs protocoles pour faciliter l’accès aux sites et le relevé de données. L’automatisation de la collecte ne porte que sur certaines variables, physiques, chimiques et topographiques et ne peut se substituer à la connaissance et à la lecture des milieux par les agents. |
L'équipe Aquadrone
|
|
L’équipe projet AFBAlexandre Liccardi (DAPP, INSIDE), Laurent Breton (DAPP), Gabriel Melun (DREC) L'équipe ESIPEJérémie Collomb, Julien Roussel, Philippe Strock, Loïc Szymanski, Thibault You, Jérôme Goasdoue, Théo Pascoli, François Vanderperre |

Quatre jours de tests grandeur nature avec les équipes de l'AFB au domaine du Paraclet
Le drone à l’épreuve !
L’équipe projet transversale DAPP(INSIDE, DSOD)/DREC(RDI), les étudiants et les agents de la direction interrégionale Normandie- Hauts de France se sont donnés rendez-vous au Paraclet début mars. L’occasion pour les étudiants de tester la pertinence des choix techniques en conditions réelles et de rencontrer les agents de terrain pour discuter ensemble de la déclinaison opérationnelle du prototype.
Défis relevés !
L’objectif étant dans un premier temps de vérifier la faisabilité opérationnelle du dispositif associant drones, capteurs et stations de traitement, le projet ne s’est intéressé aujourd’hui qu’à des données simples : profondeur du drone, température. À l’avenir, le drone pourrait être équipé d’autres capteurs pour élargir l’éventail des données ainsi recueillies.
Les référents techniques AFB
Yann Galez (SD76), Philippe Rosan (SD62), Baptiste Roussel (DIR Normandie Hauts de France), Caroline Pénil (DAPP), François Hissel (DAPP)
Dernière mise à jour le 18.05.2020