





The ESIPE school and the INSIDE cluster invest in the onboard electronics technologies to propose tomorrow survey solutions: more upgradeable, cheaper, modular, the open source ROV allow the user to place sensors basically everywhere in the water spaces. In the first place, lake and slow-stream rivers are targeted. Data are collected and broadcasted in real time and are geotracked (on the surface as well as underwater) , to let the users on the shore immediately react and analyze the situation without picking up the ROV.
An operational project built on a cooperation between the AFB/INSIDE and the UPEM/ESIPE school
The Aquadrone project has been proposed by the French Biodiversity Agency (AFB) in September 2016 to the ESIPE at Marne-la-Vallée, for the participation in an academic project with a team of young engineers, called the Last Project. The project has been selected by the students and by the academic seniors. The main purpose is the collection of bathymetric data, using ROVs on lake and slow-stream rivers.
Amongst the main requirements, the visualization in real-time of collected data implies the knowledge, at each time, of the accurate position of the ROV in the water space. The geotracking and the link with the GIS was a great part of the challenge. A particular attention has been paid to building a modular an evolutive solution, using only open source software and hardware solution, and specifying protocols with high compliancy (MAVLink, TCP).
 |
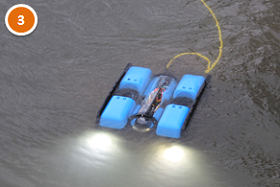
The Aquadrone team realized the whole supply chain: the choice of the technical solution, the assembling of the ROV and its electronic parts, the sofwre conception and the development of services and plugins, unit, integration and reception tests… The base ROV is a BlueROV2 from BlueRobotics, which is reliable and allows a great modularity. |
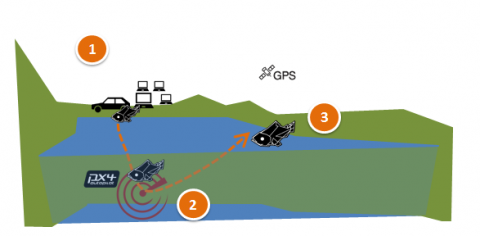
Innovating issue #1: Geotracking an underwater ROV (out of the GPS reach)
 |
Step 1. Site equipment and GPS calibration (on the shore)We assume the GPS positioning on the surface, using Reach RTK technology, is less than 50 cm precise. The navigation system and the GIS are initialized, the operators take position. |
 |
Step 2. The diving phase (underwater)The ROV is underwater: the GPS signal can’t reach it. The position is estimated using the inertial measurement unit (IMU). IMUs aren’t as accurate as GPS; we expect a progressive deviation before the indicated position is not satisfying enough, to rely on data. Then, the ROV have to emerge to the surface. |
 |
Step 3. Back to the surface and recalibration (on the surface)The aquadrone is back to the surface. Thanks to the GPS RTK positioning system, the geotracking is reevaluted with high accuracy. The previous path, and the previous data positioning, are dynamically corrected. As soon as the ROV position is calibrated, everything is ready for a new dive. |
Today (june 2017), the current empirical measure of the deviation is about 20 to 50 cm during long linear dives (within a 60 m long dive). The curvilinear acceleration during tight turns is underestimated of 1/7 to 1/6. These results are meant to be improved with the use of a better IMU.
Innovating issue #2: Broadcasting data in real-time
 |
Step 1. Maps setup, connections initializationThe operators launch the GIS and display the base maps covering the whole experimentation area. In the beginning, no data are recording but reference GPS points are determined and saved.
|
 |
Step 2. During the dive, Aquadrone collects data.The ROV is guided thanks to an onboard camera, and linked to the computer base on the shore thanks to a RJ45 cable. Captured variables, gathered thanks to custom sensors, are dynamically displayed on users GIS, connected by WiFi to the base. |
 |
Step 3. Data correction and adjustmentsWhen the Aquadrone gets to the surface and uses GPS positioning, a better geotracking is determined and a double cross algorithm corrects the data previous transmitted. On the users’ screens, the pathes on the GIS maps are nearly immediately modified. If anomalies are noticed, the experts can ask the pilot to go and check again on the spot, where the observation was made. |
Innovation issue #3: Adding sensors and collecting bathymetric data
… this issue is the main goal of the 2017 – 2018 ESIPE Last Project !
Scientific outlooks: adding sensors, environment modelization, using open source
Exploring landwaters and marine environments through diving, with a remote and an onboard camera, allows a rare freedom of movement in scientific surveys.
In a near future, adding customized sensor able to gather a large diversity of variables and bring back very large datasets (points clouds for instance) will lead to the modelization of natural habitats. This ability is expected by scientists and fileds experts.
 |
Open source context allows a full appropriation and customization of all software and hardware components. The price can be important: conception and development effort, innovation strategy, bets on new technologies… Aquadrone project innovate by using hardware open source technologies, and gathering trends from different communities (at least Apache and OSGeo for the software part, Ardusub for the hardware part). Other academic and expert teams can now use this solution and help us to improve the methodology. Finantial costs are minimized: expected cost of a whole equipped drone is about 5 000 € VAT. |
") |
The technical architecture has been designed and built by ESIPE students, with the guidance and the approval of their professors and the AFB experts. The students also provided a MAVLink stream simulator, for the later improvement of software calibration and deployment validation. |
Operational prospects: supporting fieldwork data collection
 |
The AFB has a mission to spread data about environment and to inform citizens about the ecological state of lakes and rivers. On the ground, official representatives in local departments carry out hundreds of surveys each year in order to characterize environmental quality. The Aquadrone project occurs as an help for existing protocols and local expertise, and in a middle or long term should integrate some surveys methodologies. The first impact would be to make access easier to some locations, and to automate some collections. Automation is studied only about some variables, such as bathymetry, chemistry and physics, and won’t replace the knowledge and the interpretation of our experienced agents. |
The Aquadrone team
|
|
The AFB team projectAlexandre Liccardi (DAPP, INSIDE), Laurent Breton (DAPP), Gabriel Melun (DREC) The ESIPE team projectLast Project 2016 : Jérémie Collomb, Julien Roussel, Philippe Strock, Loïc Szymanski, Thibault You, Jérôme Goasdoue, Théo Pascoli, François Vanderperre Last Project 2017 : Médalie Noubigh, Serge Dang, Laila Ayache, Rudy Krasevec |

Four days for full-scale at the Paraclet centre
The project team (from many AFB directions : DAPP, DREC, INSIDE), the ESIPE students and some local experts from the regional direction of Normandy / Hauts de France, met at the training centre of the Paraclet, near Fouencamps (30), in march 2017. The students took the opportunity to test their solution in ground technical solutions, and work together with the specialists to guarantee a better integration of their tool.
AFB technical referents
Yann Galez (SD76), Philippe Rosan (SD62), Baptiste Roussel (DIR Normandie Hauts de France), Caroline Pénil (DAPP), François Hissel (DAPP)
Dernière mise à jour le 18.05.2020